GW4型隔離開關的一般安裝調試方法
變電站中,隔離開關的數量一般為斷路器的2~4倍,由于數量比較多,其安裝調試的工作量相當的大。在110kV以下的電壓等級中,作為主導設備的GW4型隔離開關,如果隔離開關的安裝工藝及機械尺寸調整不符合要求,則會出現分、合閘不到位,觸頭過熱,甚至瓷瓶斷裂的事故。因此,很有必要將隔離開關的安裝調試方法進行總結。筆者根據自己的工作經驗,將該種型號的隔離開關的安裝調試方法歸納如下,以供同行們參考。
1 GW4型隔離開關的結構及動作原理
為了更好的掌握安裝工藝及調試方法,對隔離開關的結構及動作原理有一個足夠地了解是很有必要的。
1.1 隔離開關的結構
1.1.1隔離開關的結構
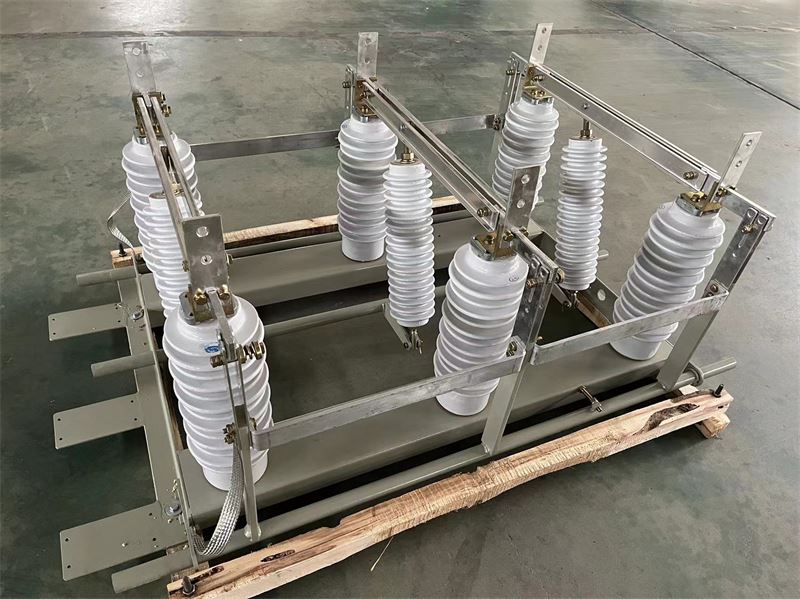
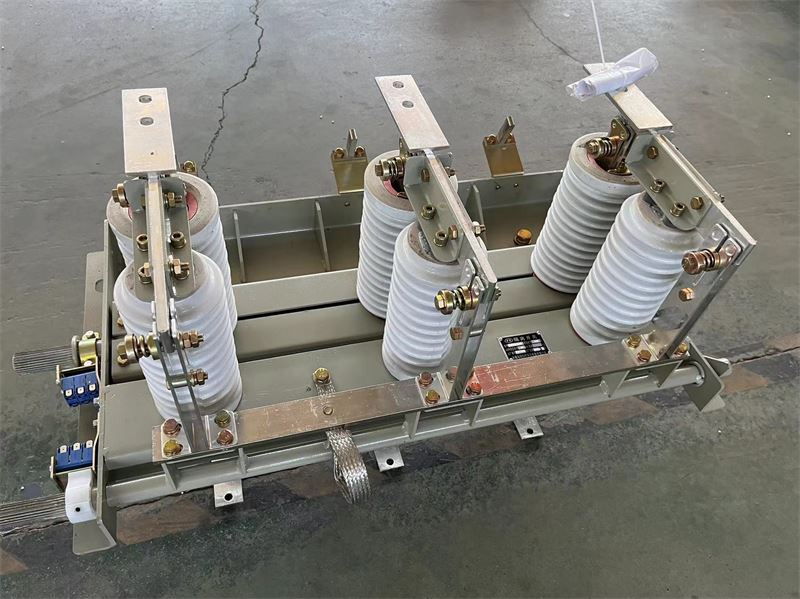
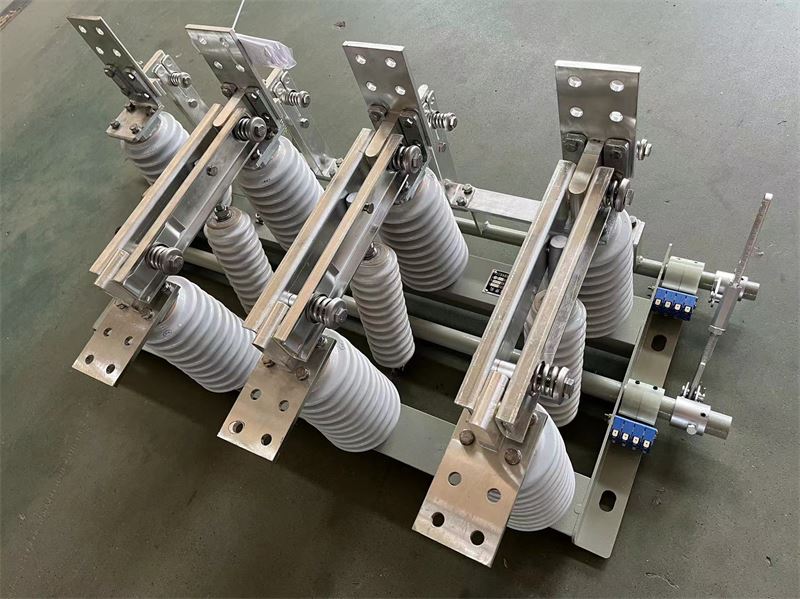
GW4型隔離開關為雙柱水平旋轉式結構,由3個單級組成,每個單級由基座、絕緣支柱和導電部分組成,配用手動或電動操作機構。
1.1.2接地開關的結構
接地開關由固定在隔離開關導電管上的靜觸頭和安裝在底座上的動觸桿組成。
1.1.3手力操動機構的結構
手力操動機構由水平面(或垂直面)內旋轉90°(或180°)的操作手柄,防雨罩及裝入其內的輔助開關組成。
1.1.4電動操作機構
電動機構的主要元件有電動機、減速箱、輔助開關、限位開關、轉換開關、接觸器、斷路器等。
1.2 隔離開關的動作原理
1.2.1隔離開關的動作原理
操動機構輸出軸轉動90°(180°) 垂直管 操作軸轉動90°(180°) 操動拐臂操作相主動極旋轉90°水平連桿 其余相主動極旋轉90°交叉連桿 帶動從動極反向旋轉90°,實現三極聯動。
1.2.2接地開關動作原理
操作機構借助傳動軸及水平連桿使接地開關轉動軸旋轉一定的角度,從而實現分合閘。
1.2.3手力操動機構的動作原理
當手柄操作時,機構輸出軸轉動,帶動與機構的主軸連接在一起的輔助開關,在分,合閘動作時將相應的觸點切斷或閉合,發出相應的分、合信號。
1.2.4電動操作機構的動作原理
電機啟動,驅動蝸輪蝸桿減速裝置,主軸轉動,帶動與主軸相連的隔離開關合、分閘。
2 隔離開關的安裝
2.1 隔離開關安裝的原則
大電流隔離開關的安裝和調試是保證其能夠正常運行的前提。從某種意義上說,良好的安裝就是調試成功的一半,因此,大電流隔離開關安裝時應本著橫平豎直的原則進行。
(1)三相的基座應上下對正,即在同一水平面內——保證水平連桿在同一個平面內。
(2)三相基座應前后平齊,即三相的從動極和主動極應分別在同一個垂直平面內——保證水平連桿在同一個平面內。
(3)三相基座應左右平行,保證水平連桿長度配合默契。
(4)三相瓷瓶應垂直——保證水平連桿在同一個平面內,且保證觸頭接觸面接觸良好。
(5)操動機構輸出軸與操作相操作軸同心——保證操作時所需的操作功最小。
2.2 大電流隔離開關各部分安裝的要求
(1)導電部分——接觸應緊密,導電應良好,必要時清擦干凈后涂凡士林或導電膏。
(2)絕緣部分——絕緣完好,滿足要求。
(3)轉動(傳動)部分——潤滑、靈活且無卡阻,不符合要求時涂MoS2等潤滑脂。
(4)固定部分——緊固牢固,不松動。
2.3 隔離開關安裝時的注意事項
(1)額定電流應符合設計要求。
(2)地刀的安裝方向符合要求。單接地時,分左接地和右接地,一般地刀在開關側。
(3)隔離開關的開口方向符合要求。當人面對隔離開關機構站立時,隔離開關的開口方向應與人的眼睛所看到的方向應一致。
(4)隔離開關的左右觸頭安裝位置正確。左觸頭(觸指側)裝于主動極側,右觸頭(觸頭側)裝于從動極側。
(5)隔離開關主刀的機構通常裝于A相操作軸下方
(6)相間距離110kV不小于2m,35kV不小于1.2m。
3 隔離開關的調試
3.1 隔離開關調試的實質
隔離開關調試的實質就是在正確、合理安裝的基礎上,使各部分的機械尺寸和角度都符合標準要求。
3.2 隔離開關的調試(從下向上)
3.2.1基座的調整
(1)基座平整度的調整。
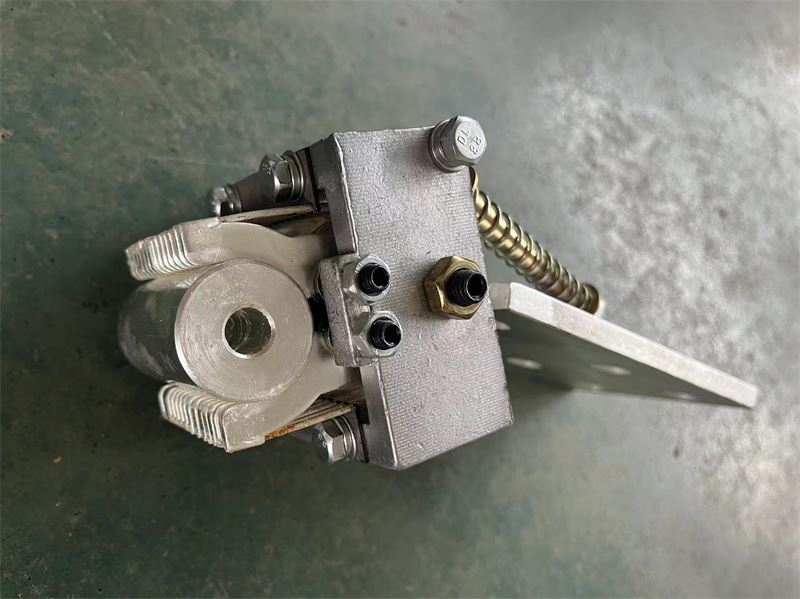
(2)拐臂1(連接水平連桿)、拐臂2(連接交叉連桿)長度及角度的調整三相應一致,拐臂3(連接主刀操作拐臂)不同廠家安裝位置不同,有些廠家產品裝于基座軸上,如下圖1;有些則安裝于水平連桿上,需要現場安裝時焊接。其長度和角度的調整,產品說明書有說明時,根據說明書調整;無說明時,以能夠滿足機構相與機構連接后,本體和機構分合角度及配合同步合適為宜。(若拐臂1、2與軸為焊接形式,則該角度和長度不可調)。
(3)定位螺釘的調整,應滿足其與定位擋板間的間隙為1~3mm。
3.2.2瓷瓶的調整。可以用調節墊進行調整,但應注意每處所加的調節墊不大于3mm,且所加墊片相互之間應焊接在一起。
(1)瓷瓶垂直度符合要求。
(2)單極的兩瓷瓶高度應相同。
3.2.3導電觸頭的調整。可以通過松開接線座上緊固導電桿的螺絲,轉動或者移動導電桿,使之對正。
(1)單極的兩導電桿(左右導電桿)觸頭對正。即高度一致,上下高度差小于5mm,并成一直線(左右)。如圖2。
(2)三相左右導電桿長度應相同。
(3)三相觸指的插入深度相同,說明書有數值時,按照數值調整;沒有數值時,按照圖3調整;既沒有數值又沒有圖3的說明時,則根據經驗調整。若太淺,合閘后中間觸頭接觸面不足;若太深,合閘時沖擊力過大,會造成沖擊損壞絕緣子。因此應保證合閘后觸指與觸頭之間留有4~6mm的裕度且保證合閘時觸指插入深度不小于深度的90%。
3.2.4操作極調整
(1)開距的調整。隔離開關分開后導電桿與基座中心線的夾角保證在 90°~ 92°范圍內,若角度不好把握,最簡單的方法是利用卷尺測量左右導電桿首尾兩端是否平行,首尾兩端距離的差值為±10mm是允許的。
(2)操作極與機構調整。將操作極本體與機構均處于合閘位置,連接本體與機構(若為活連接),當為死連結時,可以先用點焊的方式連接(待整體調整好后再焊接牢固),進行分、合閘一次,觀察操作極分合閘是否到位。
若本體合閘不到位,則調整交叉連桿的長度——“合欠使之長、合過則調短”;若本體分閘不到位,則調整操動拐臂(即圖1中的拐臂3)的長度——“分小調短、分大調長”。需要說明的是,“分小調短”可以通過兩種方法來實現,其一是增大操動拐臂的長度,其二則是增大拐臂的夾角;相反的,可以實現“調長”。
同時應注意,本體與機構運動的角度應該一致,因此,調整操動拐臂時應該兼顧分閘的角度和機構所運行的角度。
若本體合(或分)閘已到位,機構合(或分)閘不到位,表明機構運行的行程(或角度)小于本體,應該將本體合(或分)閘時運行的行程(或角度)減小,此時,需要減小操動拐臂的長度;相反,若機構到位,而本體不到位,則需要增加操動拐臂的長度。
3.2.5三極聯動調整
三極聯動的調整,必須以隔離開關的接線板均承受正常母線拉力的條件下進行,否則,當母線連接好之后,需要進行重新調整。
操作極調整好后,使三極均處于合閘狀態,連接好水平連桿后,進行三極聯動操作,分、合一次,觀察其余兩極分、合閘是否到位。三極聯動調整時,應以三極合閘同期性為標準,調整方法是當任一極的觸頭與觸指剛接觸時,測量另外兩極觸頭與觸指之間的距離,通過調整交叉連桿的長度改變。若同期調整好后,分合閘不到位,同期調整采用“折中法”即取偏大與偏小的中間值,向中間值調整,但是要滿足設備出廠同期值的標準要求。會出現下面幾種情況(現以操作極為A相說明)。
(1)三極同期但均分合閘不到位,可以適當調整操動拐臂的長度。
(2)三極不同期但分合閘均到位,通過調整交叉連桿折中調整同期,使之滿足標準要求。
(3)A、B相同期與C相不同期、但分合閘到位,調整C相交叉連桿。
(4)B、C相同期與A相不同期、但分合閘到位,調整A相交叉連桿。
(5)A、C相同期與B相不同期、但分合閘到位,調整B相交叉連桿。
(6)三相同期,A、B相分合閘不到位,調整AB極間水平連桿使之到位或調整C相交叉連桿使C相不到位程度同A、B相,再調整操動拐臂的長度。
(7)三相同期,B、C相分合不閘到位,調整BC極間水平連桿使之到位或調整A相交叉連桿使A相不到位程度同B、C相,再調整操動拐臂的長度。
(8)三相同期,A、C相分合閘不到位,調整AB、BC極間水平連桿使之到位或調整B相交叉連桿使B相不到位程度同A、C相,再調整操動拐臂的長度。
(9)最不好的一種情況,即三相既不同期也不到位,就要通過調整水平連桿、交叉連桿及操動拐臂綜合調整,遵循折中的方法使之滿足要求。
可見,三極聯動的調整原則是,保證同期符合要求,合閘時能夠合正,分閘時滿足斷口距離尺寸的規定。一般地,上述三者之間存在矛盾時,在保證分閘斷口距離的前提下,優先犧牲分閘距離。(注意:交叉連桿及水平連桿兩端的正反螺紋,調節時應盡可能使兩端外露的螺紋長度相同)
3.2.6分、合閘定位螺釘的調整
三極聯動調整后,將交叉連桿及水平連桿的背螺帽背緊,調整分、合閘定位螺釘與擋板之間的間隙為1~3mm。
3.3 接地開關的調試
接地開關的調試,是建立在隔離開關的調試完成之后的。接地開關的調試方法與隔離開關的類同,值得注意的是:
(1)接地開關的水平連桿大多都是通過管夾件連接的,因此緊固螺栓時需要交叉、對稱、均勻且逐步擰緊,否則地刀導電桿可能與接地靜觸頭存在偏移。
(2)接地導電桿與靜觸頭的接觸應良好,以導電桿露出靜觸頭3~10mm為宜,不過不同廠家規定不同,視說明書的標準而定。一般地,隔離開關的水平連桿都裝在主動極側,當接地刀為內打式且為右接地時,導電桿露出靜觸頭的尺寸不宜太大,否則當隔離開關在分閘位置時,接地刀閘可能合不上,原因是接地導電桿端頭會與隔離開關的水平連桿相互頂住。
(3)接地刀閘導電桿在分閘時應保持為水平狀態,必要時用水平尺輔助調整,以便保證接地開關分閘后的絕緣距離滿足要求。
3.4 機械連鎖調整
隔離開關和接地開關調整完畢后,對機械連鎖進行調整,標志著整組隔離開關的調試工作完成。
調整基座上的扇形板與弧形板的相對位置,使得隔離開關合閘時,接地開關不可合閘,接地開關合閘時,隔離開關不可合閘。
3.5 手力操作機構的調試
手力操作機構的調整,是隨著本體的調整一起調整的,不過調整的同時應該檢查:
(1)機構轉動是否靈活,要求操作手柄上需要的操作功不大于1㎏f。
(2)輔助開關切換正確,標準是輔助開關在機構操動過程大約處于極限位置的4/5處可靠切換。
3.6 電動操作機構的調試
電動機構的調試較手動機構相對復雜,調試檢查項目有。
(1)機構各元件完好。
(2)接線正確,手動、電動,就地、遠方各操作數次,動作正確。
(3)通電試操作前,先使機構處于分、合閘中間位置,再操作。
(4)電動機轉動方向同本體分、合閘的方向一致。
(5)機構電氣限位和機械限位調整合適且與本體分、合閘終了位置吻合。
4 結束語
由于隔離開關長期被認為是一種簡易的電氣設備,因此,在運行過程中,經常會出現諸如機械卡滯、導電回路發熱等缺陷,導致被迫停電檢修的問題,嚴重的影響了供電的可靠性。熟悉隔離開關的結構、動作原理及安裝調試方法,可以有效的避免停電的事故和動作的不可靠性,并且能夠提高作業現場的工作效率,解決設備不可靠運行與電力系統可靠運行的矛盾。